
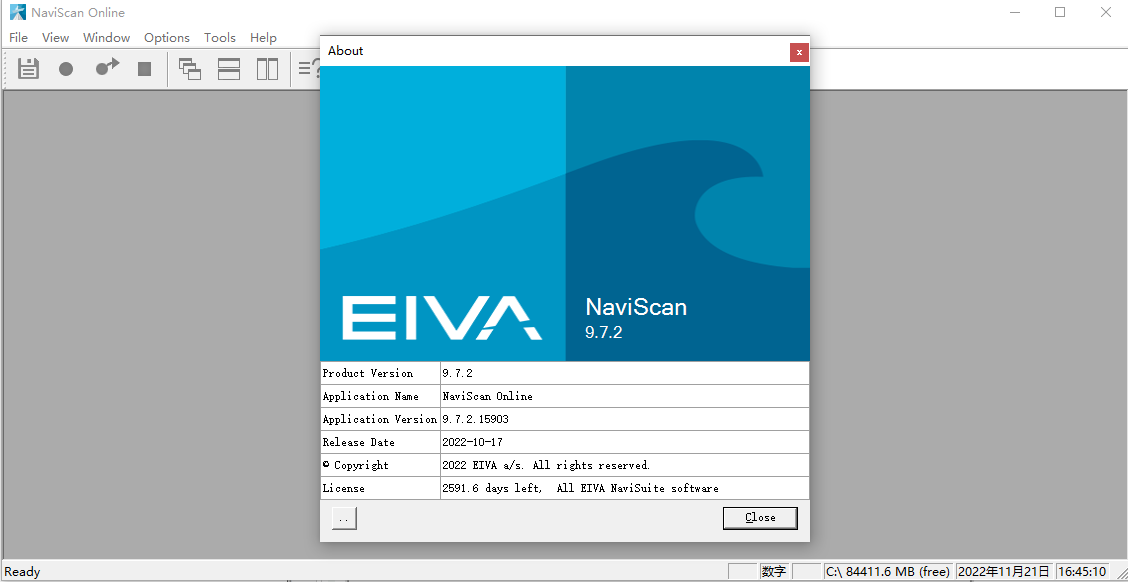
EIVA NaviScan(声纳/传感器/激光数据采集系统) v9.7.6 免费安装激活版
- 大小:170MB
- 分类:其它行业
- 环境:Windows
- 更新:2023-08-29
热门排行










简介
EIVA NaviScan破解版是一款声纳、传感器和激光数据采集系统,它从市场上所有重要的管道和电缆跟踪器和声纳获取数据,包括多波束回声测深仪、扫描和剖面声纳以及传统的侧扫声纳。NaviScan的目的是从多波束传感器收集数据并生成包含每次扫描准确位置的文件。为此,需要导航信息以及陀螺仪、滚动/俯仰/起伏和深海传感器。NaviScan Config(离线/设置)包括几个用于设置NaviScan系统和处理原始数据文件的实用程序。NaviScan SonarDisplay和NaviScan Target是添加到EIVA NaviScan的应用程序。这些应用程序作为NaviScan安装程序的一部分分发。NaviScan SonarDisplay用于侧扫数据的瀑布显示,可以在线或离线操作。NaviScan Target用于目标处理。NaviScan SonarDisplay可以在两种模式下运行,在线或离线。在NaviScan Online将侧扫数据记录到SBD文件的在线操作期间,SonarDisplay可以作为本地或远程瀑布显示。在离线模式下,SonarDisplay可用于播放和目标选择。NaviScan Target促进了每个目标的处理。SonarControl可从SonarDisplay应用程序访问。它为支持的声纳提供特殊的控制能力。
NaviScan将获取数据和可视化信息,使用户能够监督系统,检查传入数据的质量,并确保没有传感器脱落。开始记录时,数据以二进制专有格式(*.SBD)存储。本次提供的是最新的EIVA NaviScan破解版下载地址,欢迎需要此款工具的朋友前来下载使用。

功能特色
1、NaviScan数据采集软件专为多波束回声测深仪和侧扫声纳技术而设计。支持各种回声测深仪、侧扫仪、管道跟踪器和辅助定位仪器。EIVA为船舶和ROV调查提供了最佳解决方案。
2、NaviScan的基本目的是从Echosounder传感器收集数据,并生成包含每次扫描准确位置的文件。为此,需要导航信息以及横摇/俯仰/升沉、水深传感器和陀螺仪。为了改善位置,NaviScan包括对多普勒速度日志的支持。包括另一个功能;将回声测深仪数据和管道跟踪器相结合,以获得最佳的管道测量结果。
3、NaviScan软件包包含将原始记录数据转换为可用于处理软件包的运动校正数据的程序。在该转换阶段,对俯仰、横滚、航向、C-O等数据进行校正,并过滤掉所有低质量数据。
4、所有NaviScan程序都可以在一台PC上执行,因为多任务环境允许同时执行更多程序,而不会干扰在线数据时间标记:这一非常重要的过程被放置在专用的实时队列中。对于较大的设置,系统可以在更多的计算机上拆分。
5、NaviScan系统在PC平台上工作,该平台简单、易于操作,且动员时间最少。该系统灵活且用户友好。它提供精确的时间标记和持续运行的最大启动时间。系统配置基于客户端/服务器原理,由一台或多台PC(通过局域网(LAN)连接)组成。该系统分为两部分:;一个专用于在线数据采集和记录(NaviScanOnline),另一个用于离线数据转换、过滤、编辑、配置设置和数据传输(NaviScanconfiguration)。收集的数据显示在屏幕上,以便操作员可以监控系统;检查输入数据的质量,并确保没有传感器脱落。
6、为每条测量线收集的数据将存储在操作员指定的文件中。当线路结束时(通过导航系统或操作员发出的信号),文件将关闭。
技术细节和系统要求
支持的操作系统:Windows 11、Windows 10、Windows 8.1、Windows 7
RAM(内存):2 GB RAM(推荐使用4 GB)
可用硬盘空间:200 MB或更多
安装激活教程
1、在本站下载并解压,如图所示
2、安装程序, 勾选我接受协议
3、安装目录
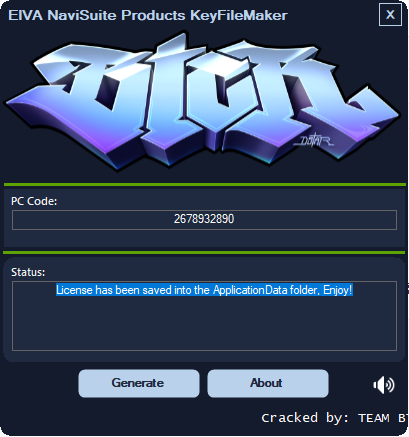
4、keymaker,点击生成按钮,许可证已保存到ApplicationData文件夹中,享受!
使用说明
1、GPS时间
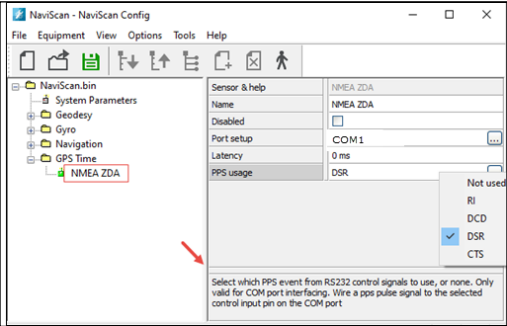
PPS用法:从RS232控制信号中选择要使用的PPS事件,或不使用。
•传感器和帮助
显示预期的数据格式,此处为$xxZDA,hhmmss.hh,dd,mm,yyyy,xx<cr><lf>
•已禁用
禁用传感器的使用,这样它就不会在NaviScan Online中使用,也不会产生警报,并且在保存设置时会被放置在传感器列表的底部。
•端口设置
始终输入源发送数据的ip地址,如果从本地pc发送,则输入localhost。对于UDP/ATTU,ip地址用作筛选器,仅传递来自该ip的数据,如果要禁用UDP筛选器并从发送到端口的所有ip获取数据,则可以使用ip地址0.0.0.0。注意:与naviscan online不同,从发送到端口的所有ip地址接收并显示数据,因此您无法确定传入测试来自输入的ip。
•延迟
延迟校正(以毫秒为单位),在接收每个数据包时,将从时间戳中减去该延迟校正,以便在测量数据时校正时间戳是否有效,当数据在数据包中携带时间戳时,通常将其设置为0,但在COM端口接口的传感器上可能需要,因为某些运动传感器具有已知的延迟,例如25毫秒。
•PPS使用
从RS232控制信号中选择要使用的PPS事件,或不使用。仅对COM端口接口有效。将PPS脉冲信号连接到COM端口上的选定控制输入引脚
您可以使用不带PPS的时间同步,NaviScan将在ZDA/UTC消息中使用时间戳,并将其视为实时。对于MBE的获取,这通常不够准确!
NaviScan计算机时间与声纳时间同步通常很重要。
2、Runline控件
这是与NaviPac的数据通信。每秒钟检索一次运行行信息。
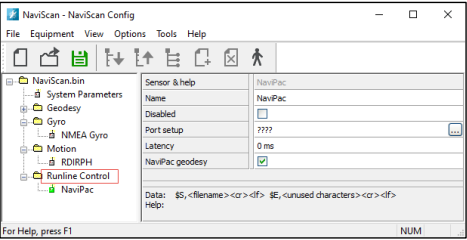
•标准设置,如传感器和帮助、名称、禁用、端口设置、延迟
•NaviPac大地测量
使用从NaviPac接收的大地测量数据包作为记录和应用大地测量,这将否决NaviScan配置大地测量。在收到此类大地测量数据包之前,nsconfig大地测量数据将用作备份
3、陀螺仪
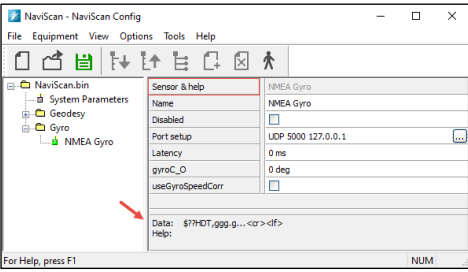
图30带有传感器和帮助选项的传感器NMEA陀螺仪,显示预期数据格式
在陀螺仪设置时,识别陀螺仪系统;只有在选择自由格式时才能定义陀螺仪偏移:
•标准设置,如传感器和帮助、名称、禁用、端口设置、延迟
•陀螺C_0
此传感器的C-O值
•使用GyroSpeedCor
使用动态陀螺仪校正
 chrome下载
chrome下载 知乎下载
知乎下载 Kimi下载
Kimi下载 微信下载
微信下载 天猫下载
天猫下载 百度地图下载
百度地图下载 携程下载
携程下载 QQ音乐下载
QQ音乐下载