
C语言软件spi虚拟总线中间层设计详解
作者:MacRsh
简介
mr-soft-spi 模块为 mr-library 项目下的可裁剪模块,以C语言编写,可快速移植到各种平台(主要以嵌入式mcu为主)。 mr-soft-spi 模块通过 io 模拟实现 spi 协议。
SPI-协议
SPI 一般为一主多从设计。由4根线组成:CLK(时钟)、MISO(主机输入-从机输出)、MOSI(主机输出-从机输入)、CS/NSS(片选)。
接线方式
| 主机 | 从机 |
|---|---|
| CLK | CLK |
| MISO | MISO |
| MOSI | MOSI |
| CS/NSS | CS/NSS |
主机从机一 一对应相接。
总线
SPI之所以被称为总线,是其可以在一条总线上挂载多个设备,不同于IIC的地址码设计,设备通过CS/NSS切换,更加高效。

理论上SPI可以挂载无限多的设备,只要有足够的CS/NSS。但在实际应用中IO资源是极为稀缺的,所以利用SPI的特性,有了菊花链设计。
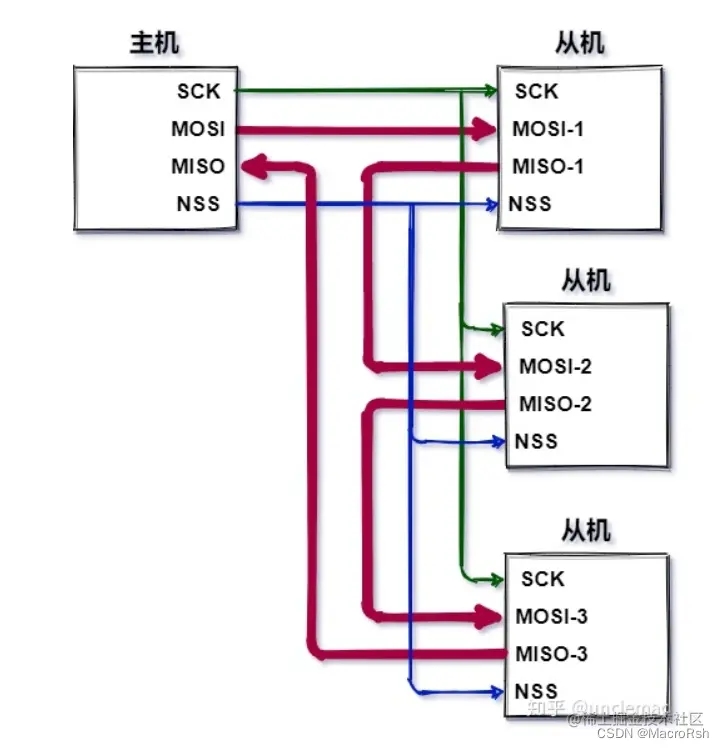
主机将数据发送给从机1,从机1将数据发送给从机2,从机2将数据发送给从机3。菊花链充分利用了SPI的工作本质,减少了IO的占用。
工作本质
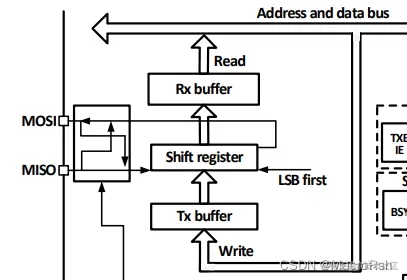
我们可以看到在MOSI和MISO之间有一个移位寄存器,需要发送的数据从主机内部被写入到Tx buffer,然后移位寄存器移动一位,那么数据就被“挤”出到MOSI上,因为整体结构为环形,与此同时MISO上也被“挤”进了一位数据,存入Rx buffer,以此往复,就完成了全双工通信。
4种工作模式
时钟极性
| CPOL | 空闲时电平 |
|---|---|
| 0 | 空闲时为低电平 |
| 1 | 空闲时为高电平 |
时钟相位
| CPHA | 采集数据在第几个边缘 |
|---|---|
| 0 | 第一个跳变沿采样 |
| 1 | 第二个跳变沿采样 |
工作模式
| MODE | CPOL | CPHA |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
时序图:

h2>虚拟总线(中间层)设计
首先 SPI 总线的CLK、MISO、 MOSI这3条线是不会变动的,所以我们可以把这部分单独设计为spi-bus,SPI总线需要知道当前有哪个设备拥有SPI总线的使用权,为了防止出现抢占还需要配置一个互斥锁。
struct mr_soft_spi_bus
{
void (*set_clk)(mr_uint8_t level); // 操作 CLK 的函数指针
void (*set_mosi)(mr_uint8_t level); // 操作 MOSI 的函数指针
mr_uint8_t (*get_miso)(void); // 读取 MISO 的函数指针
struct mr_soft_spi *owner; // 当前该总线的所有者
mr_uint8_t lock; // 互斥锁
};
SPI设备唯一独有的只有CS/NSS一条线,所以我们把这部分定义为spi-device。SPI设备还需要知道自己归属于哪条SPI总线。
struct mr_soft_spi
{
mr_uint8_t mode :2; // SPI 工作模式
mr_uint8_t cs_active :1; // CS/NSS 的有效电平(一般为低)
struct mr_soft_spi_bus *bus; // 该设备归属的总线
void (*set_cs)(mr_uint8_t level); // 操作 CS/NSS 的函数指针
};
当创建了一条spi-bus,一个spi-device后我们需要一个挂载函数,即将spi-device挂载到spi-bus上
void mr_soft_spi_attach(struct mr_soft_spi *spi, struct mr_soft_spi_bus *spi_bus)
{
spi->bus = spi_bus;
}
那么由于是虚拟总线设计,当我们要开始传输前需要先去获取总线。
mr_err_t mr_soft_spi_bus_take(struct mr_soft_spi *spi)
{
mr_uint8_t spi_bus_lock;
/* check spi-bus owner */
if(spi->bus->owner != spi)
{
/* check mutex lock */
do{
spi_bus_lock = spi->bus->lock;
} while(spi_bus_lock != MR_UNLOCK);
/* lock mutex lock */
spi->bus->lock = MR_LOCK;
/* stop spi cs */
if(spi->bus->owner != MR_NULL)
spi->bus->owner->set_cs(!spi->bus->owner->cs_active);
/* exchange spi-bus owner */
spi->bus->owner = spi;
/* start spi cs */
spi->set_cs(spi->cs_active);
}
else
{
/* lock mutex lock */
spi->bus->lock = MR_LOCK;
/* start spi cs */
spi->set_cs(spi->cs_active);
}
return MR_EOK;
}
当我们使用完毕后需要释放总线
mr_err_t mr_soft_spi_bus_release(struct mr_soft_spi *spi)
{
/* check spi-bus owner */
if(spi->bus->owner == spi)
{
/* stop spi cs */
spi->set_cs(!spi->cs_active);
/* unlock mutex lock */
spi->bus->lock = MR_UNLOCK;
return MR_EOK;
}
return -MR_ERROR;
}
到此其实虚拟总线已经设计完毕,设备需要使用仅需通过挂载 、获取、释放 三步操作即可,其余操作交由中间层处理。 为调用接口的统一,设计spi-msg
struct mr_soft_spi_msg
{
mr_uint8_t read_write; // 读写模式:SPI_WR/ SPI_RD/ SPI_RDWR/ SPI_WR_THEN_RD
mr_uint8_t *send_buffer; // 发送数据地址
mr_size_t send_size; // 发送数据个数
mr_uint8_t *recv_buffer; // 接收数据地址
mr_size_t recv_size; //接收数据个数
};
然后通过transfer函数统一调用接口。
mr_err_t mr_soft_spi_transfer(struct mr_soft_spi *spi, struct mr_soft_spi_msg msg)
{
mr_err_t ret;
/* check function args */
MR_DEBUG_ARGS_NULL(spi,-MR_EINVAL);
MR_DEBUG_ARGS_IF(msg.read_write > SPI_WR_THEN_RD,-MR_EINVAL);
/* take spi-bus */
ret = mr_soft_spi_bus_take(spi);
if(ret != MR_EOK)
return ret;
if(msg.read_write == SPI_WR || msg.recv_buffer == MR_NULL)
msg.recv_size = 0;
if(msg.read_write == SPI_RD || msg.send_buffer == MR_NULL)
msg.send_size = 0;
switch (msg.read_write) {
case SPI_RD:
/* receive */
while (msg.recv_size) {
*msg.recv_buffer = mr_soft_spi_bus_transmit(spi,0u);
++msg.recv_buffer;
--msg.recv_size;
}
break;
case SPI_WR:
/* send */
while (msg.send_size) {
mr_soft_spi_bus_transmit(spi,*msg.send_buffer);
++msg.send_buffer;
--msg.send_size;
}
break;
case SPI_WR_THEN_RD:
/* send */
while (msg.send_size) {
mr_soft_spi_bus_transmit(spi,*msg.send_buffer);
++msg.send_buffer;
--msg.send_size;
}
/* receive */
while (msg.recv_size) {
*msg.recv_buffer = mr_soft_spi_bus_transmit(spi,0u);
++msg.recv_buffer;
--msg.recv_size;
}
break;
case SPI_RDWR:
/* transmit */
while (msg.send_size) {
*msg.recv_buffer = mr_soft_spi_bus_transmit(spi,*msg.send_buffer);
++msg.send_buffer;
++msg.recv_buffer;
--msg.send_size;
}
break;
}
/* release spi-bus */
mr_soft_spi_bus_release(spi);
return MR_EOK;
}
使用示例
/* -------------------- 配置 -------------------- */
/* 创建一条 spi 总线 */
struct mr_soft_spi_bus spi_bus;
/* 适配 spi 总线接口 */
void set_clk(mr_uint8_t level)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_0,level);
}
void set_mosi(mr_uint8_t level)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_1,level);
}
mr_uint8_t get_miso(void)
{
return GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2);
}
/* 配置 spi 总线 */
spi_bus.set_clk = set_clk;
spi_bus.set_mosi = set_mosi;
spi_bus.get_miso = get_miso;
spi_bus.lock = MR_UNLOCK;
spi_bus.owner = MR_NULL;
/* 创建一个 spi 设备 */
struct mr_soft_spi spi_device;
/* 适配 spi 设备接口 */
void set_cs(mr_uint8_t level)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_3,level);
}
/* 配置 spi 设备 */
spi_device.mode = SPI_MODE_0; //SPI MODE 0
spi_device.cs_active = LEVEL_LOW; //CS 引脚低电平有效
spi_device.set_cs = set_cs;
/* -------------------- 使用 -------------------- */
int main(void)
{
/* 需要发送的数据 */
mr_uint8_t buffer[10]={0,1,2,3,4,5,6,7,8,9};
/* 初始化 gpio */
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 挂载 spi 设备到 spi 总线 */
mr_soft_spi_attach(&spi_device,&spi_bus);
/* 创建 spi 消息 */
struct mr_soft_spi_msg spi_msg;
spi_msg.send_buffer = buffer; //发送数据地址
spi_msg.send_size = 10; //发送数据数量
spi_msg.recv_buffer = MR_NULL; //读取数据地址
spi_msg.recv_size = 0; //读取数据数量
spi_msg.read_write = SPI_WR; //只读模式
/* 发送消息 */
mr_soft_spi_transfer(&spi_device,spi_msg);
}
剩余底层代码位于开源代码中,请下载开源代码。
开源代码仓库链接 gitee.com/chen-fanyi/…
路径:master/mr-library/ device / mr_soft_spi
请仔细阅读README.md !!!!!
以上就是C语言软件spi虚拟总线中间层设计详解的详细内容,更多关于C语言软件spi虚拟总线中间层的资料请关注脚本之家其它相关文章!