
C++版本基于ros将文件夹中的图像转换为bag包
作者:YOULANSHENGMENG
这篇文章主要介绍了C++版本基于ros将文件夹中的图像转换为bag包,本文通过图文并茂的形式给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下
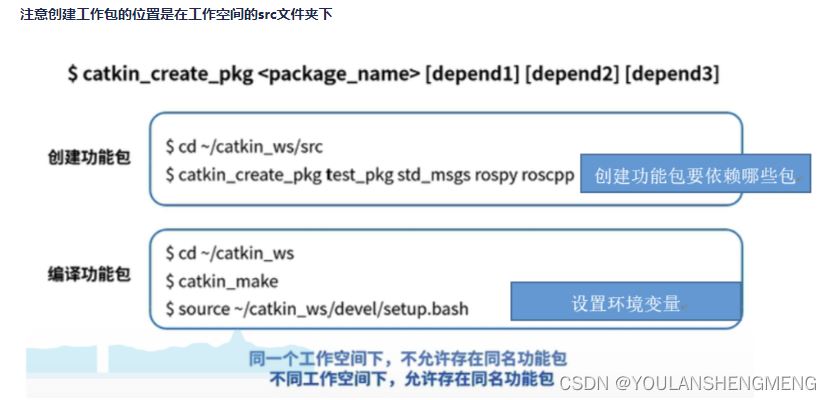
一、前期工作创建工作空间

二、创建工作包

创建完成后,文件夹的格式为:

三、准备编译文件和代码
3.1 更换编译文件中的内容
将上图中的,CMakeLists.txt文件中的内容,替换为下面的内容
cmake_minimum_required(VERSION 3.0.2)
project(create_bag)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
# 寻找OpenCV库
find_package( OpenCV REQUIRED )
# 添加头文件
include_directories( ${OpenCV_INCLUDE_DIRS} )
find_package(catkin REQUIRED COMPONENTS
cv_bridge
rosbag
roscpp
rospy
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES imgtobag
# CATKIN_DEPENDS cv_bridge rosbag roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${rosbag_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
add_executable(node src/torosbag.cpp)
target_link_libraries(node
${catkin_LIBRARIES}
${PCL_LIBRARIES}
${rosbag_LIBRARIES}
${OpenCV_LIBS}
)
3.2 准备主程序
leedarson@leedarson-desktop:~/catkin_ws/src/create_bag/src$ touch torosbag.cpp
创建一个cpp的文件夹,cpp文件中的内容为:
#include <string>
#include <ros/console.h>
#include <rosbag/bag.h>
#include <cv_bridge/cv_bridge.h>
#include <iostream>
#include <vector>
#include <sys/types.h>
#include <dirent.h>
#include <unistd.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
void GetFileNames(string path,vector<string>& filenames, string con);
void GetFileNamesByGlob(cv::String path,vector<cv::String>& filenames, string con);
bool read_images(string path, vector<string> &image_files);
int main(int argc, char **argv)
{
//输入文件和输出文件路径
string base_dir = "/home/leedarson/catkin_ws/src/create_bag/data/";
string img_dir = base_dir + "img/";
std::cout<<"image path is"<<img_dir<<std::endl;
string output_bag=base_dir +"Human2.bag";
string img_format = ".jpg";//格式
vector<string> img_names;
//GetFileNames(img_dir, img_names,".jpg");
read_images(img_dir, img_names);
cout<<"图片读取完成"<<endl;
cout<<"----"<<endl;
ros::Time::init();
rosbag::Bag bag;
bag.open(output_bag, rosbag::bagmode::Write);
int seq = 0;
vector<string>::iterator it;
for(it = img_names.begin(); it != img_names.end();it++)//todo 之后改成图片数量的多少
{
string tmp = *it;
std::cout<<"tmp path is"<<tmp<<std::endl;
//cout<<tmp<<endl;
//string strImgFile = img_dir + tmp + img_format;
string strImgFile = tmp;
usleep(200000);//4hz
ros::Time timestamp_ros = ros::Time::now();
// --- for image ---//
cv::Mat img = cv::imread(strImgFile);
if (img.empty())
cout<<"图片为空: "<<strImgFile<<endl;
cv_bridge::CvImage ros_image;
sensor_msgs::ImagePtr ros_image_msg;
ros_image.image = img;
ros_image.encoding = "bgr8";
//cout<<"debug_______"<<endl;
//ros::Time timestamp_ros2 = ros::Time::now();
ros_image_msg = ros_image.toImageMsg();
ros_image_msg->header.seq = seq;
ros_image_msg->header.stamp = timestamp_ros;
ros_image_msg->header.frame_id = "/image_raw";
bag.write("/camera/color/image_raw", ros_image_msg->header.stamp, ros_image_msg);
cout<<"write frame: "<<seq<<endl;
seq++;
}
cout<<"---end---"<<endl;
return 0;
}
//con:文件格式 form:文件命名形式
void GetFileNames(string path,vector<string>& filenames, string con)
{
DIR *pDir;
struct dirent* ptr;
string filename, format, name, name2;
if(!(pDir = opendir(path.c_str())))
return;
int num=0;
while((ptr = readdir(pDir))!=0)
{
//跳过.和..文件
if(strcmp(ptr->d_name, ".") == 0 || strcmp(ptr->d_name, "..") == 0)
continue;
filename = ptr->d_name;
format = filename.substr(filename.find("."), filename.length());
//name = filename.substr(0, filename.find("."));
name = filename.substr(0, filename.find("."));
cout<<filename<<"\t"<<name<<"\t"<<format<<endl;
if(format == con)//也可以添加对文件名的要求
{
filenames.push_back(name);
num++;
}
}
std::cout<<"file size of:"<<filenames.size()<<"****"<<num<<std::endl;
closedir(pDir);
}
//cv::glob(路径,要放置路径下文件定义的容器,false)
/*find_first_of()和find_last_of()
执行简单的模式匹配,如在字符串中查找单个字符c:函数find_first_of() 查找在字符串中第1个出现的字符c,而函数find_last_of()查找最后一个出现的c。匹配的位置是返回值。如果没有匹配发生,则函数返回-1*/
//复制子字符串substr(所需的子字符串的起始位置,默认值为0 , 复制的字符数目)返回值:一个子字符串,从其指定的位置开始
//按图片名升序排列
bool read_images(string path, vector<string> &image_files)
{
//fn存储path目录下所有文件的路径名称,如../images/0001.png
vector<cv::String> fn;
cv::glob(path, fn, false);
size_t count_1 = fn.size();
if (count_1 == 0)
{
cout << "file " << path << " not exits"<<endl;
return -1;
}
//v1用来存储只剩数字的字符串
vector<string> v1;
for (int i = 0; i < count_1; ++i)
{
//cout << fn[i] << endl;
//1.获取不带路径的文件名,000001.jpg(获取最后一个/后面的字符串)
string::size_type iPos = fn[i].find_last_of('/') + 1;
string filename = fn[i].substr(iPos, fn[i].length() - iPos);
//cout << filename << endl;
//2.获取不带后缀的文件名,000001
string name = filename.substr(0, filename.rfind("."));
//cout << name << endl;
v1.push_back(name);
}
//把v1升序排列
sort(v1.begin(), v1.end(),[](string a, string b) {return stoi(a) < stoi(b); });
string v = ".jpg";
size_t count_2 = v1.size();
for(int j = 0; j < count_2; ++j)
{
string z = path + v1[j] + v;
image_files.push_back(z);//把完整的图片名写回来
}
return true;
}
四、编译及执行
4.1 编译


4.2 执行
1,首先打开一个终端,输入roscore,启动ros
2,打开新的终端,进入工作空间,执行以下语句
leedarson@leedarson-desktop:~/catkin_ws$ source devel/setup.bash
leedarson@leedarson-desktop:~/catkin_ws$ rosrun create_bag node
通过以上操作就可以将文件夹中的图像转换为bag包。
4.3 检测录制的bag包的话题和信息
rostopic list
rostopic echo
到此这篇关于C++版本基于ros将文件夹中的图像转换为bag包的文章就介绍到这了,更多相关ros图像转换bag包内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!