
pytorch 搭建神经网路的实现
作者:weixin_44457930
1 数据
(1)导入数据
我们以Fashion-MNIST数据集为例,介绍一下关于pytorch的数据集导入。
PyTorch域库提供许多预加载的数据集(如FashionMNIST),这些数据集是torch.utils.data.Dataset的子类,并实现了特定于指定数据的功能。
Fashion-MNIST是Zalando文章中的图像数据集,包含60,000个训练示例和10,000个测试示例。每个示例包括28×28灰度图像和来自10个类中的一个的关联标签。
import torch
from torchvision import datasets
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE' # 没有这句会报错,具体原因我也不知道
training_data = datasets.FashionMNIST(
root="../data",
train=True,
download=True,
transform=ToTensor()
)
test_data = datasets.FashionMNIST(
root="../data",
train=False,
download=True,
transform=ToTensor()
)
输出(下面的截图不完整)
我们使用以下参数加载FashionMNIST数据集:
root是存储训练/测试数据的路径,
train指定训练或测试数据集,
download=True 如果数据集不存在于指定存储路径,那么就从网上下载。
transform和target_transform用于指定属性和标签转换操作,这里所说的“转换操作”,通常封装在torchvision.transforms中,因此通常需要导入torchvision.transforms,或者导入这个包中的操作
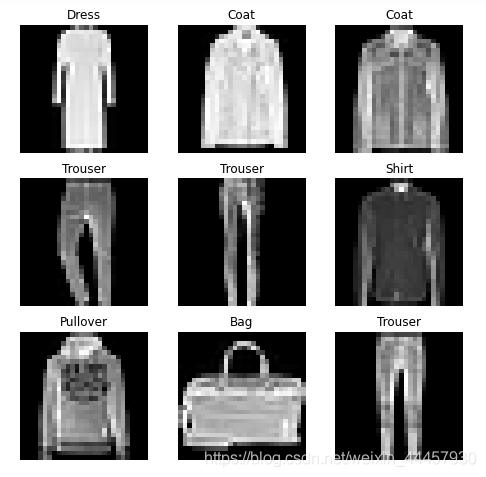
(2)数据集可视化
我们可以像列表一样手动索引数据集:training_data[index]。我们使用matplotlib来可视化训练数据中的一些示例。
labels_map = {
0: "T-Shirt",
1: "Trouser",
2: "Pullover",
3: "Dress",
4: "Coat",
5: "Sandal",
6: "Shirt",
7: "Sneaker",
8: "Bag",
9: "Ankle Boot",
}
figure = plt.figure(figsize=(8, 8))
cols, rows = 3, 3
for i in range(1, cols * rows + 1):
# 从0-len(training_data)中随机生成一个数字(不包括右边界)
sample_idx = torch.randint(len(training_data), size=(1,)).item()
img, label = training_data[sample_idx] # 获得图片和标签
figure.add_subplot(rows, cols, i)
plt.title(labels_map[label])
plt.axis("off") # 坐标轴不可见
plt.imshow(img.squeeze(), cmap="gray") # 显示灰度图
plt.show()
输出
上面的程序中,有两个地方指的注意,一个是可以求training_data的长度,另一个可以通过索引获得单个样本,当然这里的样本已经被转换成了张量,如下图所示

(3)为自己制作的数据集创建类
如果要导入自己制作的数据集,需要编写一个类,这个类用于继承torch.utils.data中的Dataset类。自制的数据集类必须实现三个函数:init、len__和__getitem,分别是初始化类,求长度len(obj),通过索引获得单个样本(像列表一样)。
import os
import pandas as pd
from torch.utils.data import Dataset
from torchvision.io import read_image
class CustomImageDataset(Dataset):
def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):
self.img_labels = pd.read_csv(annotations_file)
self.img_dir = img_dir
self.transform = transform
self.target_transform = target_transform
def __len__(self):
return len(self.img_labels)
def __getitem__(self, idx):
img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])
image = read_image(img_path)
label = self.img_labels.iloc[idx, 1]
if self.transform:
image = self.transform(image)
if self.target_transform:
label = self.target_transform(label)
return image, label
具体细节可以在pytorch的官网教程:https://pytorch.org/tutorials/beginner/basics/data_tutorial.html
Creating a Custom Dataset for your files
(4)数据集批处理
上面的程序中,虽然可以使用索引获得样本,但一次只能获得单个样本,无法像列表、张量、numpy切片一样一次切出多个

而在训练模型的时候,我们希望能够批处理,即一次处理若干个样本,同时,我们希望数据在每次遍历完之后打乱一次,以减少过拟合,并使用Python的多处理来加快数据提取。
pytorch中,专门有一个类可以实现上述功能,即torch.utils.data.DataLoader
下面的程序是将数据集导入到DataLoader中
from torch.utils.data import DataLoader train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True) # train_dataloader是一个DataLoader类的对象 test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
training_data和test_data就是前面导入的数据集,由于我们指定了batch的大小是64,因为我们指定了shuffle=True,所以在遍历所有batch之后,数据将被打乱。
此时training_data和test_data仍然不是可迭代对象,还需要将其变成可迭代对象,可以使用iter函数将每一个batch转化成可迭代对象,或者enumerate函数将其的每个batch带上序号变成元组
用iter函数
for batch_index, (features, label) in enumerate(train_dataloader):
print(batch_index)
print(f"Feature batch shape: {features.size()}")
print(f"Labels batch shape: {label.size()}")
img = features[0].squeeze()
label = label[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")
break
输出
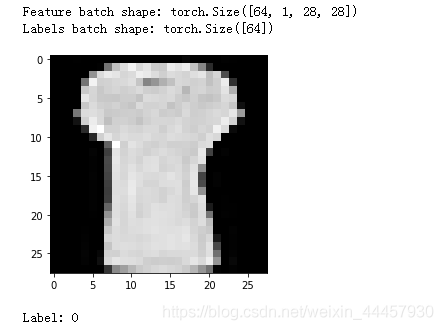
上面的程序中,train_features, train_labels都是包含64个样本的张量
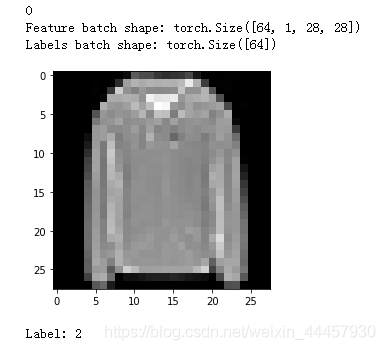
用enumerate函数
for batch_index, (features, label) in enumerate(train_dataloader):
print(batch_index)
print(f"Feature batch shape: {features.size()}")
print(f"Labels batch shape: {label.size()}")
img = features[0].squeeze()
label = label[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")
break
(5)数据预处理
数据并不总是以训练机器学习算法所需的最终处理形式出现,因此我们需要对数据进行一些变换操作,使其适合于训练。
所有的TorchVision数据集都有两个参数,它们接受包含转换逻辑的可调用对象:(1)transform用于修改特性,(2)target_transform用于修改标签
torchvision.transforms模块提供了多种常用的转换,这里我们介绍一下ToTensor和Lambda。
为了进行训练,我们需要将FashionMNIST中的特征转化为normalized tensors,将标签转化为One-hot编码的张量。为了完成这些变换,我们使用ToTensor和Lambda。
import torch
from torchvision import datasets
from torchvision.transforms import ToTensor, Lambda
ds = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
target_transform=Lambda(lambda y: torch.zeros(10, dtype=torch.float).scatter_(dim=0, index=torch.tensor(y), value=1))
)
ToTensor将PIL图像或NumPy ndarray转换为FloatTensor,并将图像的像素值(或者灰度值)缩放到[0, 1]区间
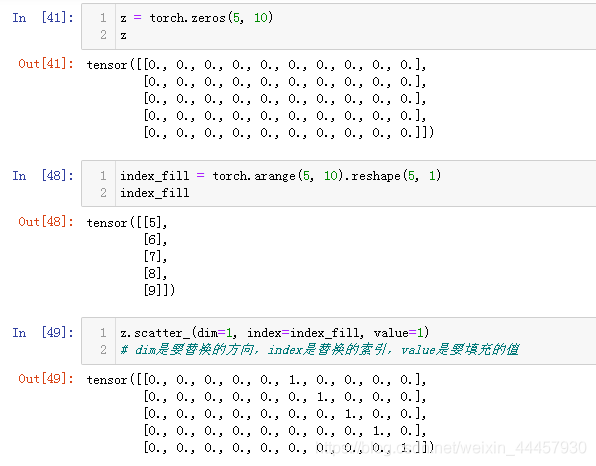
Lambda可以用于任何用户定义的lambda函数,在这里,我们定义一个函数来将整数转换为一个one-hot编码张量,首先建立一个长度为10的0张量(之所以为10,是因为有10个类别),然后调用scatter_函数,把对应的位置换成1。scatter_函数的用法如下:
更多torchvision.transforms的API详见:https://pytorch.org/vision/stable/transforms.html
2 神经网络
神经网络由对数据进行操作的层/模块组成,torch.nn提供了构建的神经网络所需的所有构建块。PyTorch中的每个模块都继承了nn.Module,神经网络本身就是一个模块,它由其他模块(层)组成,这种嵌套结构允许轻松构建和管理复杂的体系结构。
在下面的小节中,我们将构建一个神经网络来对FashionMNIST数据集中的图像进行分类。
(1)定义神经网络类
我们通过继承nn.Module来定义我们的神经网络类,并在__init__中初始化神经网络层,每一个nn.Module的子类在forward方法中继承了对输入数据的操作。
在初始化方法中搭建网络结构
class NeuralNetwork(nn.Module):
def __init__(self):
super(NeuralNetwork, self).__init__()
self.flatten = nn.Flatten() # 打平
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512), # 线性层
nn.ReLU(), # 激活层
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
nn.ReLU()
)
def forward(self, x):
x = self.flatten(x) # 打平层
logits = self.linear_relu_stack(x) # 线性激活层
return logits
We create an instance of NeuralNetwork, and print its structure.
我们可以建立一个NeuralNetwork(即刚刚定义的类)的实例,并打印它的结构
model = NeuralNetwork() print(model)
输出
NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
使用模型时,我们将输入数据传递给它,这将执行模型的forward方法,以及一些背后的操作。注意:不要直接调用model.forward() !
定义好我们自己的神经网络类之后,我们可以随机生成一个张量,来测试一下输出的size是否符合要求
每个样本传入模型后会得到一个10维的张量,将这个张量传入nn.Softmax的实例中,可以得到每个类别的概率
X = torch.rand(1, 28, 28) # 生成一个样本
logits = model(X) # 将样本输入到模型中,自动调用forward方法
print(logits.size())
pred_probab = nn.Softmax(dim=1)(logits) # 实例化一个Softmax对象,并通过对象调用
y_pred = pred_probab.argmax(1) # 获得概率最大索引
print(f"Predicted class: {y_pred}")
输出
torch.Size([1, 10])
Predicted class: tensor([8])
(2)神经网络组件
上面搭建神经网络时,我们使用了打平函数、线性函数、激活函数,我们来看看这些函数的功能
打平层
input_image = torch.rand(3,28,28) print(input_image.size())
输出
torch.Size([3, 28, 28])
线性层
layer1 = nn.Linear(in_features=28*28, out_features=20) hidden1 = layer1(flat_image) print(hidden1.size())
输出
torch.Size([3, 20])
线性层其实就是实现了 y=w*x + b,其实是和下面的程序是等效的,但下面的程序不适合放在nn.Sequential中(但可以放在forward方法里)
w = torch.rand(784, 20) b = torch.rand((1, 20)) hidden2 = flat_image @ w + b print(hidden2.size())
输出
torch.Size([3, 20])
nn.Sequential是一个模块容器类,在初始化时,将各个模块按顺序放入容器中,调用模型时,数据按照初始化时的顺序传递。
例如:
seq_modules = nn.Sequential(
flatten, # 在nn.Sequential中可以调用其他模块
layer1,
nn.ReLU(),
nn.Linear(20, 10)
)
input_image = torch.rand(3,28,28)
logits = seq_modules(input_image)
在nn.Sequential中可以调用其他模块,nn.Sequential定义的模块也可以被其他模块调用
(3)模型参数
神经网络中的许多层都是参数化的,也就是说,在训练过程中会优化相关的权值和偏差,我们可以使用模型的parameters()或named_parameters()方法访问所有参数。
model.parameters()返回的是一个参数生成器,可以用list()将其转化为列表,例如
para_list = list(model.parameters())
# 将参数生成器转换成列表之后,列表的第一个元素是w,第二个元素是b
print(type(para_list[0]))
print(f'number of linear_layers :{len(para_list)/2}')
print('weights:')
print(para_list[0][:2]) # 只切出两个样本来显示
print('bias:')
print(para_list[1][:2])
print('\nthe shape of first linear layer:', para_list[0].shape)
输出
<class 'torch.nn.parameter.Parameter'>
number of linear_layers :3.0
weights:
tensor([[ 0.0135, 0.0206, 0.0051, ..., -0.0184, -0.0131, -0.0246],
[ 0.0127, 0.0337, 0.0177, ..., 0.0304, -0.0177, 0.0316]],
grad_fn=<SliceBackward>)
bias:
tensor([0.0333, 0.0108], grad_fn=<SliceBackward>)the shape of first linear layer: torch.Size([512, 784])
named_parameters()方法返回参数的名称和参数张量,例如:
print("Model structure: ", model, "\n\n")
for name, param in model.named_parameters():
print(f"Layer: {name} | Size: {param.size()} | Values : \n{param[:2]} \n")
# 只切出前两行显示
输出
Model structure: NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
Layer: linear_relu_stack.0.weight | Size: torch.Size([512, 784]) | Values :
tensor([[ 0.0135, 0.0206, 0.0051, ..., -0.0184, -0.0131, -0.0246],
[ 0.0127, 0.0337, 0.0177, ..., 0.0304, -0.0177, 0.0316]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.0.bias | Size: torch.Size([512]) | Values :
tensor([0.0333, 0.0108], grad_fn=<SliceBackward>)Layer: linear_relu_stack.2.weight | Size: torch.Size([512, 512]) | Values :
tensor([[ 0.0338, 0.0266, -0.0030, ..., -0.0163, -0.0096, -0.0246],
[-0.0292, 0.0302, -0.0308, ..., 0.0279, -0.0291, -0.0105]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.2.bias | Size: torch.Size([512]) | Values :
tensor([ 0.0137, -0.0036], grad_fn=<SliceBackward>)Layer: linear_relu_stack.4.weight | Size: torch.Size([10, 512]) | Values :
tensor([[ 0.0029, -0.0025, 0.0105, ..., -0.0054, 0.0090, 0.0288],
[-0.0391, -0.0088, 0.0405, ..., 0.0376, -0.0331, -0.0342]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.4.bias | Size: torch.Size([10]) | Values :
tensor([0.0406, 0.0369], grad_fn=<SliceBackward>)
更多关于torch.nn的API请看:https://pytorch.org/docs/stable/nn.html
3 最优化模型参数
(1)超参数
在绘制计算图之前,需要给出超参数,这里说的超参数,指的是学习率、批大小、迭代次数等
learning_rate = 1e-3 batch_size = 64 epochs = 5
(2)损失函数
回归问题一般用nn.MSELoss,二分类问题一般用nn.BCELoss,多分类问题一般用nn.CrossEntropyLoss,这里FashionMNIST中,标签有十个类别,因此这里我们用nn.CrossEntropyLoss
# Initialize the loss function loss_fn = nn.CrossEntropyLoss()
(3)优化方法
这里我们用随机梯度下降,即每传入一个样本,更新一次参数
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
更多优化方法的API,可以看:https://pytorch.org/docs/stable/optim.html
常用的优化算法原理,可以看:https://zhuanlan.zhihu.com/p/78622301
4 模型的训练与测试
(1)训练循环与测试循环
每个epoch包括两个主要部分:
训练循环(train_loop)——遍历训练数据集并尝试收敛到最优参数。
验证/测试循环(test_loop)——遍历测试数据集以检查模型性能是否正在改善。
我们先把上述两个过程封装成函数
def train_loop(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
for batch, (X, y) in enumerate(dataloader):
# Compute prediction and loss,下面两步相当于绘制计算图
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad() # 梯度信息清零
loss.backward() # 反向传播
optimizer.step() # 一旦有了梯度,就可以更新参数
if batch % 100 == 0:
loss, current = loss.item(), batch * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
def test_loop(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
with torch.no_grad(): # 禁用梯度跟踪,后面会讲
for X, y in dataloader:
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
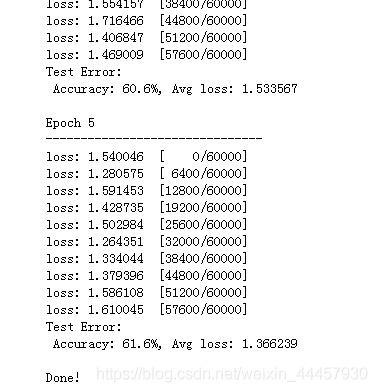
现在可以进行训练了
for t in range(epochs):
print(f"Epoch {t+1}\n-------------------------------")
train_loop(train_dataloader, model, loss_fn, optimizer)
test_loop(test_dataloader, model, loss_fn)
print("Done!")
输出
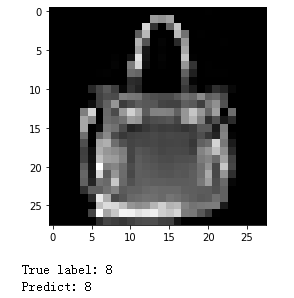
我们可以写一段代码,看看预测的图片对不对
test_features, test_labels = next(iter(test_dataloader))
logits = model(test_features[0])
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
img = test_features[0].squeeze() # 将长度为1的维度去掉
true_label = test_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"True label: {true_label}")
print(f"Predict: {pred.item()}")
输出
(2)禁用梯度跟踪
在上面的测试循环中,使用了torch.no_grad()方法,在表示所在的with块不对梯度进行记录。
默认情况下,所有requires_grad=True的张量(在创建优化器的时候,内部就把里面的参数全部设置为了requires_grad=True)都跟踪它们的计算历史并支持梯度计算。但是,在某些情况下,我们并不需要这样做,例如,测试的时候,我们只是想通过网络进行正向计算。我们可以通过使用torch.no_grad()块包围计算代码来停止跟踪计算:
z = torch.matmul(x, w)+b
print(z.requires_grad)
with torch.no_grad():
z = torch.matmul(x, w)+b
print(z.requires_grad)
输出
True
False
禁用梯度跟踪主要用于下面两种情况:
(1)将神经网络中的一些参数标记为冻结参数,这是对预先训练过的网络进行微调的一个常见的场景
(2)当你只做正向传递时,为了加快计算速度,因为不跟踪梯度的张量的计算会更有效率。
5 模型的保存、导入与GPU加速
(1)模型的保存与导入
PyTorch模型将学习到的参数存储在一个内部状态字典中,称为state_dict,我们可以通过torch.save()将模型的参数保存到指定路径。
保存了模型的参数,还需要保存模型的形状(即模型的结构)
# 保存模型参数 torch.save(model.state_dict(), './model_weights.pth') # 保存模型结构 torch.save(model, './model.pth')
导入模型时,需要先导入模型的结构,再导入模型的参数,代码如下:
# 导入模型结构
model_loaded = torch.load('./model.pth')
# 如果原来的model在cuda:0上,那么导入之后,model_loaded也在cuda:0上
# 导入模型参数
model_loaded.load_state_dict(torch.load('model_weights.pth'))
因为model是NeuralNetwork类的一个对象,所以在导入状态前,必须先有一个NeuralNetwork对象,要么实例化一个,要么通过导入结构torch.load('./model.pth')导入一个.
torch.load直接导入模型,不是特别推荐,原因有以下两点:
(1)如果A.py文件中的程序保存了model.pth,如果文件B.py想读取这个模型,则不能直接用torch.load导入模型结构,必须先实例化一个NeuralNetwork对象,要么从A.py或者从其他文件中把NeuralNetwork类给导进来,要么这里重写一个与A.py中一模一样的NeuralNetwork类,类名也要一样,否则报错。
# 实例化一个NeuralNetwork对象
model_loaded = NeuralNetwork() # model_loaded默认是CPU中
# 导入模型参数
model_loaded.load_state_dict(torch.load('./gdrive/MyDrive/model_weights.pth'))
(2)如果用torch.load导入模型,当我们在cuda:0上训练好一个模型并保存时,读取出来的模型也是默认在cuda:0上的,如果训练过程的其他数据被放到了如cuda:1上,则会报错。而实例化创建模型,由于.load_state_dict可以跨设备,则无论原来的模型在什么设备上,都不妨碍把参数导入到新创建的模型对象当中。
综合上面两点,torch.load慎用,最好是先实例化后再导入模型状态。
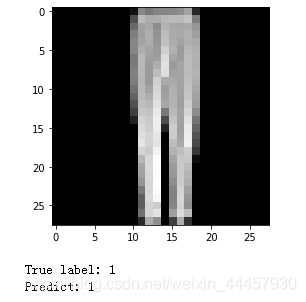
我们可以用导入的模型做预测
test_features, test_labels = next(iter(test_dataloader))
logits = model_loaded(test_features[0]) # 使用导入的模型
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
img = test_features[0].squeeze() # 将长度为1的维度去掉
true_label = test_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"True label: {true_label}")
print(f"Predict: {pred.item()}")
输出
(2)GPU加速
默认情况下,张量和模型是在CPU上创建的。如果想让其在GPU中操作,我们必须使用.to方法(确定GPU可用后)显式地移动到GPU。需要注意的是,跨设备复制大张量在时间和内存上开销都是很大的!
# We can move our tensor to the GPU if available
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print('Using {} device'.format(device))
输出
Using cuda device
在初始化模型时,可以将模型放入GPU中
model = NeuralNetwork().to(device)
对于张量,可以在创建的时候指定为在GPU上创建,也可以在创建后转移到GPU当中
X = torch.rand(1, 28, 28, device=device) # 创建时指定设备 Y = torch.rand(10).to(device) # 创建后转移
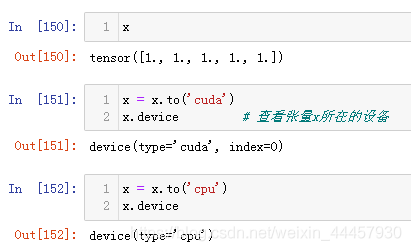
当然,张量和模型也能从GPU转移到CPU当中,我们可以用.device()来查看张量所在设备
另外,需要注意的是,如果需要将模型送到GPU当中,必须在构建优化器之前。因为CPU和GPU中的模型,是两个不同的对象,构建完优化器再将模型放入GPU,将导致优化器只优化CPU中的模型参数。
有些电脑有多张显卡,那么.to(‘cuda')默认是将张量或者模型转移到第一张显卡(编号为0)上,如果想转移到其他显卡上,则用下面的程序
device = torch.device(‘cuda:2') # 2是设备号,假如有八张显卡,那么编号就是0—7
torch.save
至此,所有程序已经完成
总结
上面的程序有点乱,我这里综合一下:
# coding=utf-8
import torch
import torch.nn as nn
from torchvision import datasets
from torch.utils.data import DataLoader
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE' # 没有这句会报错,具体原因我也不知道
# 导入数据
training_data = datasets.FashionMNIST(
root="../data",
train=True,
download=True,
transform=ToTensor()
)
test_data = datasets.FashionMNIST(
root="../data",
train=False,
download=True,
transform=ToTensor()
)
# 定义超参数
# 之所以在这个地方定义,是因为在初始化DataLoader时需要用到batch_size
learning_rate = 1e-3
batch_size = 64
epochs = 5
train_dataloader = DataLoader(training_data, batch_size=batch_size, shuffle=True)
# train_dataloader是一个DataLoader类的对象
test_dataloader = DataLoader(test_data, batch_size=batch_size, shuffle=True)
# 搭建神经网络
class NeuralNetwork(nn.Module):
def __init__(self):
super(NeuralNetwork, self).__init__()
self.flatten = nn.Flatten() # 打平
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512), # 线性层
nn.ReLU(), # 激活层
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
nn.ReLU()
)
def forward(self, x):
x = self.flatten(x) # 打平层
logits = self.linear_relu_stack(x) # 线性激活层
return logits
# 确定使用设备
device = 'cuda' if torch.cuda.is_available() else 'cpu'
# 实例化一个神经网络类
model = NeuralNetwork().to(device)
# 确定损失函数
loss_fn = nn.CrossEntropyLoss()
# 确定优化器
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
# 封装训练过程
def train_loop(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device) # 将样本和标签转移到device中
# Compute prediction and loss,下面两步相当于绘制计算图
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad() # 梯度信息清零
loss.backward() # 反向传播
optimizer.step() # 一旦有了梯度,就可以更新参数
if batch % 100 == 0:
loss, current = loss.item(), batch * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
# 封装测试过程
def test_loop(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device) # 将样本和标签转移到device中
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
# 训练
for t in range(epochs):
print(f"Epoch {t+1}\n-------------------------------")
train_loop(train_dataloader, model, loss_fn, optimizer)
test_loop(test_dataloader, model, loss_fn)
print("Done!")
# 保存模型参数
torch.save(model.state_dict(), './model_weights.pth')
# 保存模型结构
torch.save(model, './model.pth')
# 导入模型结构
model_loaded = torch.load('./model.pth') # 模型自动导入到GPU当中
# 导入模型参数
model_loaded.load_state_dict(torch.load('model_weights.pth'))
# 用导入的模型测试
test_features, test_labels = next(iter(test_dataloader))
test_features = test_features.to(device)
logits = model_loaded(test_features[0]) # 使用导入的模型
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
# 可视化
img = test_features[0].squeeze() # 将长度为1的维度去掉
img = img.to('cpu') # 绘图时,需要将张量转回到CPU当中
true_label = test_labels[0] # 标签是否转移到CPU无所谓,因为没有用于plt的方法中
plt.imshow(img, cmap="gray")
plt.show()
print(f"True label: {true_label}")
print(f"Predict: {pred.item()}")
到此这篇关于pytorch 搭建神经网路的实现的文章就介绍到这了,更多相关pytorch 神经网路内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!