
C#环境下串口通信技术的技术体系与工程实践详解
作者:加号3
串口通信(Serial Communication)是工业控制、嵌入式开发、物联网领域最基础也最持久的通信方式。尽管 USB、以太网已普及,RS-232/RS-485 串口因其简单可靠、实时性强、抗干扰能力好,仍在自动化设备、医疗仪器、GPS 模块等场景占据核心地位。本文系统梳理 C# 环境下串口通信的技术体系与工程实践。
一、串口通信基础概念
1. 物理层标准
RS-232:点对点通信,传输距离通常不超过 15 米,电平标准 ±3V 至 ±15V,抗共模干扰能力较弱。常见于 PC 与外设直连、调制解调器。
RS-485:差分信号传输,支持总线型组网(一主多从),距离可达 1200 米,抗干扰能力显著优于 RS-232。工业现场总线、PLC 通信的首选。
RS-422:差分传输但仅支持一主一从,已逐渐被 RS-485 替代。
TTL 串口:单片机直接输出的 3.3V/5V 电平,需通过 MAX232/MAX485 芯片转换为标准 RS 电平才能与 PC 通信。
2. 通信参数四要素
波特率(Baud Rate):每秒传输的码元数,常见 9600、115200、921600 等。双方必须严格一致,否则数据完全错乱。
数据位:通常为 8 位,兼容早期 7 位 ASCII 的场景已罕见。
停止位:1 位、1.5 位或 2 位,用于帧同步。停止位越多,抗时钟漂移能力越强,但效率降低。
校验位:无校验、奇校验、偶校验。现代通信多依赖更高层的 CRC 校验,物理层校验位使用减少。
3. 流控制机制
硬件流控(RTS/CTS、DTR/DSR):通过专用信号线告知对方是否准备好接收数据,防止缓冲区溢出。适用于高速、大数据量传输。
软件流控(XON/XOFF):通过发送特殊字符(0x13/0x11)控制数据流,节省硬件连线,但无法传输二进制数据(与控制字符冲突)。
二、.NET 串口架构设计
System.IO.Ports 命名空间
.NET Framework 时代内置的 SerialPort 类是 C# 串口开发的标准入口。该类封装了 Win32 API 的串口操作,提供同步(Read/Write)与异步(BeginRead/BeginWrite)两种模式。
核心设计特点:
- 事件驱动模型:DataReceived 事件在接收缓冲区有数据时触发。但需注意,该事件在辅助线程引发,直接操作 UI 需通过 Invoke 机制跨线程调度。
- 缓冲区管理:底层使用操作系统提供的读写缓冲区,应用层通过 ReadBufferSize/WriteBufferSize 调节容量。工业场景下,过小缓冲区可能导致高波特率时数据丢失。
- 编码处理:默认使用 ASCII 编码,处理中文或二进制数据时必须显式指定为 Encoding.UTF8 或直接操作字节流。
三、数据接收的三种模式
1. 模式一:事件驱动(推荐用于不规则数据)
设备主动上报、数据包长度不固定时,依赖 DataReceived 事件最自然。但事件触发次数与数据量无固定对应关系——一次事件可能包含多个数据包,也可能仅收到半个包。
关键挑战:粘包与分包。串口是字节流协议,无消息边界概念。接收方必须维护状态机,按协议帧头、长度字段、校验和进行重组。
典型场景:GPS 模块以 NMEA 0183 格式输出,每条语句以 $ 开头、\r\n 结尾。接收缓冲区可能同时包含完整语句和下一个语句的前半段。
2. 模式二:轮询读取(适合固定周期)
在定时器(Timer)中周期性调用 Read 方法检查缓冲区。实现简单、逻辑线性,但 CPU 占用率与轮询频率成正比。仅适用于低实时性要求的调试工具。
3. 模式三:异步流式读取(.NET 6+ 推荐)
利用 SerialPort.BaseStream.ReadAsync 配合 PipeReader,实现真正的异步零拷贝处理。这是现代 .NET 的高性能方案,避免线程池线程阻塞,特别适合高并发串口服务器。
四、协议设计与数据完整性
1. 帧结构设计原则
工业通信协议通常采用以下结构:
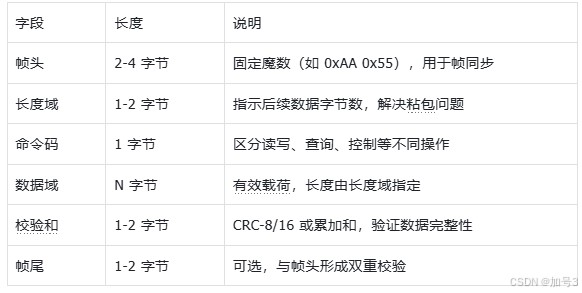
2. 校验算法选择
累加和校验:计算简单,适合短帧、低误码率环境。但漏检率较高,两位错误可能相互抵消。
CRC-8/16:工业标准,检错能力强。Modbus RTU 协议采用 CRC-16,CAN 总线采用 CRC-15。C# 可通过查表法或位运算实现,避免每次计算都遍历多项式除法。
异或校验:计算最快,但检错能力最弱,仅适合临时调试。
3. 超时与重传机制
串口通信无内置确认机制,应用层必须实现请求-应答模式:
- 响应超时:发送指令后启动定时器,规定时间内未收到应答视为失败
- 重传策略:固定重试次数(通常 3 次),超过则上报通信故障
- 帧间隔:Modbus 等协议要求帧间保持 3.5 字符时间的静默,避免总线冲突
五、代码实现
using System;
using System.IO.Ports;
using System.Linq;
using System.Text;
using System.Threading;
namespace DAL
{
public class AsySerialDal
{
private static readonly object syncRoot = new object();
const int COMDAL_RECVBUF_SIZE = 512;
bool _isReceivingdal = false;
private string m_portdal = "COMX";
bool bComOpenDal = false;//标志
SerialPort SerialPort = new SerialPort();
byte[] ComRecvBuf = new byte[COMDAL_RECVBUF_SIZE + 1];
public delegate void ReturnRecStr(byte[] RecveiveInfo, int datalen,string portName);
public event ReturnRecStr ReturnRecStrEvent;
//打开串口的方法
public bool OpenPort(string PortName, int baurate)
{
m_portdal = PortName;
bool ret = false;
try
{
if (bComOpenDal == false)
{
SerialPort.PortName = PortName;//端口号
SerialPort.BaudRate = baurate;//波特率
SerialPort.Parity = Parity.Odd;//偶校验位
SerialPort.DataBits = 8;//数据位为8
SerialPort.StopBits = StopBits.One;//1个停止位
SerialPort.ReadTimeout = 500;
SerialPort.RtsEnable = true;
SerialPort.Handshake = Handshake.None;//控制协议
SerialPort.ReceivedBytesThreshold = 1;
SerialPort.DataReceived += new SerialDataReceivedEventHandler(SerialPort_DataReceived);
SerialPort.Open();
bComOpenDal = true;
}
}
catch (Exception ex)
{
}
if (SerialPort.IsOpen)
{
ret = true;
}
return ret;
}
//关闭串口的方法
public void ClosePort()
{
if (bComOpenDal == true)
{
SerialPort.DataReceived -= SerialPort_DataReceived;
SerialPort.Close();
if (!SerialPort.IsOpen)
{
}
bComOpenDal = false;
}
}
private void SerialPort_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
lock (syncRoot)
{
_isReceivingdal = true;
if (ComRecvBuf != null && bComOpenDal == true)
{
SerialPort sp = (SerialPort)sender;
while (sp.IsOpen && sp.BytesToRead > 0)
{
int len = sp.BytesToRead > COMDAL_RECVBUF_SIZE ? COMDAL_RECVBUF_SIZE : sp.BytesToRead;
sp.Read(ComRecvBuf, 0, len);
if (ReturnRecStrEvent != null)
{
ReturnRecStrEvent(ComRecvBuf, len, m_portdal);//推送到上一层。
}
}
}
_isReceivingdal = false;
}
}
//向串口发送数据
public void SendCommandByte(byte[] WriteBuffer)
{
try
{
if (bComOpenDal == true && SerialPort.IsOpen == true)
{
SerialPort.Write(WriteBuffer, 0, WriteBuffer.Length);
}
}
catch (Exception ex)
{
}
}
}
}
六、实践中的典型问题
问题一:打开端口后首包数据乱码
根因:多数 USB 转串口芯片在打开端口瞬间会输出缓冲区残留数据或芯片自检信息。SerialPort.DiscardInBuffer 可在打开后清空输入缓冲区,但部分芯片在硬件层面即输出,软件无法拦截。
对策:打开端口后延迟 100-500ms 再发送首条指令;或在协议层增加握手阶段,待设备稳定后再进入业务通信。
问题二:高波特率下数据丢失
现象:115200 波特率以上时,偶发字节丢失或校验错误。
排查路径:
- 确认 USB 转串口芯片规格:CH340 理论支持 2Mbps,但部分廉价模块晶振精度不足,高波特率误差累积
- 检查 ReadBufferSize 是否足够:Windows 默认 4096 字节,高速连续数据应增大至 64KB
- 验证事件处理耗时:DataReceived 中若执行复杂解析或 UI 更新,可能错过下一次事件
- 关闭流控制后测试:硬件流控信号线接触不良会导致发送方误判为"接收方未就绪"
问题三:多线程并发访问
SerialPort 实例非线程安全,同时读写会引发不可预期的异常或数据交织。
架构方案:
- 生产者-消费者队列:所有发送请求入队,由专用发送线程顺序执行
- 读写锁分离:读线程专注接收与解析,写线程专注发送,通过 ConcurrentQueue 交换数据
- 避免 UI 线程直接操作串口:所有串口操作委托给后台线程,UI 仅通过事件接收解析后的业务数据
问题四:热插拔与端口消失
USB 转串口设备拔出后,已打开的 SerialPort 实例不会自动感知,后续读写抛出异常。
处理策略:
- 捕获 IOException 并标记端口状态为断开
- 使用 WMI(Windows Management Instrumentation)监听 USB 设备插拔事件,自动重连
- Linux 环境下监控 udev 事件或轮询 /dev 目录
问题五:跨平台编码陷阱
处理中文设备名称或包含中文的协议文本时,Windows 默认 GB2312 与 Linux 默认 UTF-8 的差异会导致乱码。务必显式统一编码,二进制协议则完全规避此问题。
七、高级应用场景
场景一:Modbus RTU 主站
工业自动化中最常见的串口协议。实现要点:
- 时序严格:帧间隔必须大于 3.5 字符时间,波特率 9600 时约 3ms
- 广播模式:地址 0 为广播,设备不回应,需应用层延迟等待
- 异常响应:功能码最高位置 1 表示错误,需解析异常码
场景二:多串口并发服务器
工控上位机需同时管理数十个串口(连接多条产线的 PLC)。架构设计:
- 端口池管理:动态分配/回收串口资源,监控各端口健康状态
- 统一协议网关:将不同设备的私有协议转换为统一 JSON 或 MQTT 格式,供上层系统消费
- 流量整形:限制各端口的轮询频率,避免总线拥塞
场景三:串口转网络桥接
将传统串口设备接入以太网或云平台。C# 可实现:
- TCP 透传:串口数据 ↔ Socket 字节流双向转发
- MQTT 网关:将串口采集的传感器数据按主题发布,支持云端订阅
- WebSocket 代理:浏览器通过 WebSocket 直连串口设备,实现 Web 化监控界面
八、调试与诊断工具链
1. 物理层验证
示波器/逻辑分析仪:抓取 TX/RX 波形,验证波特率精度、起始位/停止位格式、电平幅度。RS-485 需差分探头观测 A/B 线对。
USB 协议分析仪:排查 USB 转串口驱动层面的数据丢失或延迟异常。
2. 软件层监控
串口监视器:如 Portmon、Serial Port Monitor,拦截系统底层的 IRP(I/O Request Packet),观察实际收发时序与缓冲区状态。
虚拟串口对:使用 com0com 等工具创建虚拟互联串口,在无硬件条件下模拟双机通信。
3. 日志策略
生产环境必须记录:
- 每次 Open/Close 的时间与结果
- 收发数据的原始字节(十六进制)与解析后的业务含义
- 超时、校验失败、重传等异常事件的上下文
九、结语
串口通信是连接数字世界与物理设备的最后一英里。C# 凭借 System.IO.Ports 的简洁封装与 .NET 生态的丰富工具链,在工控上位机、设备调试工具、物联网网关等场景中展现出强大生产力。但技术的简洁性背后,是对物理层时序、协议完整性、异常边界条件的深刻理解。优秀的串口程序不是代码量的堆砌,而是对"字节在铜线上如何流动"这一本质问题的精准把控。
到此这篇关于C#环境下串口通信技术的技术体系与工程实践详解的文章就介绍到这了,更多相关C#串口通信内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!