
C++图论核心之最短路径算法从原理到实战
作者:落羽的落羽
这篇文章主要介绍了C++图论核心之最短路径算法,最短路径问题是指,从在带权的有向图中从某一顶点出发,找到通往另一顶点的最短路径,最短指的是沿路径各边的权值总和最小,需要的朋友可以参考下
一、Dijkstra算法
最短路径问题是指,从在带权的有向图中从某一顶点出发,找到通往另一顶点的最短路径,“最短”指的是沿路径各边的权值总和最小。
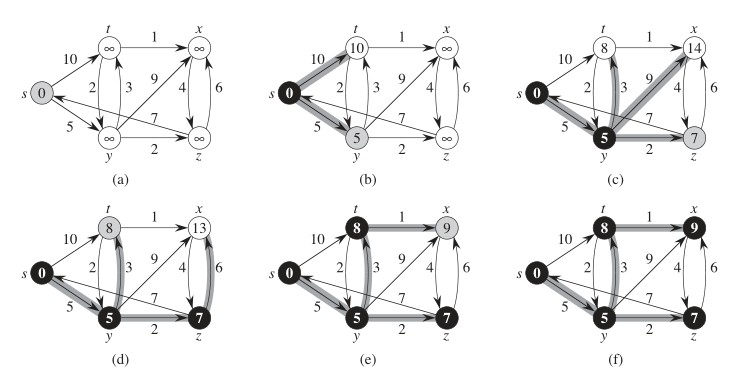
Dijkstra算法是单源最短路径的经典贪心算法,只能用于没有负权的图。它从起点出发,每次选当前距离最小且未确定最短路径的节点,用它去松弛(更新)所有邻接点的最短路径估计值,标记该节点为 “已确定”,重复此过程直到所有节点处理完毕,最终得到起点到图中所有节点的最短路径。
// src是选定的起点,dist记录起点到各点的最短路径,pPath记录到每个点的最短路径的前驱顶点下标
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
dist.resize(n, MAX_W);
pPath.resize(n, -1);
dist[srci] = 0;
pPath[srci] = srci;
// 已经确定最短路径的顶点集合
vector<bool> S(n, false);
for (size_t j = 0; j < n; ++j)
{
// 选最短路径顶点且不在S更新其他路径
int u = 0;
W min = MAX_W;
for (size_t i = 0; i < n; ++i)
{
if (S[i] == false && dist[i] < min)
{
u = i;
min = dist[i];
}
}
S[u] = true;
// 松弛更新u连接顶点v srci->u + u->v < srci->v 更新
for (size_t v = 0; v < n; ++v)
{
if (S[v] == false && _matrix[u][v] != MAX_W
&& dist[u] + _matrix[u][v] < dist[v])
{
dist[v] = dist[u] + _matrix[u][v];
pPath[v] = u;
}
}
}
}二、Bellman_Ford算法
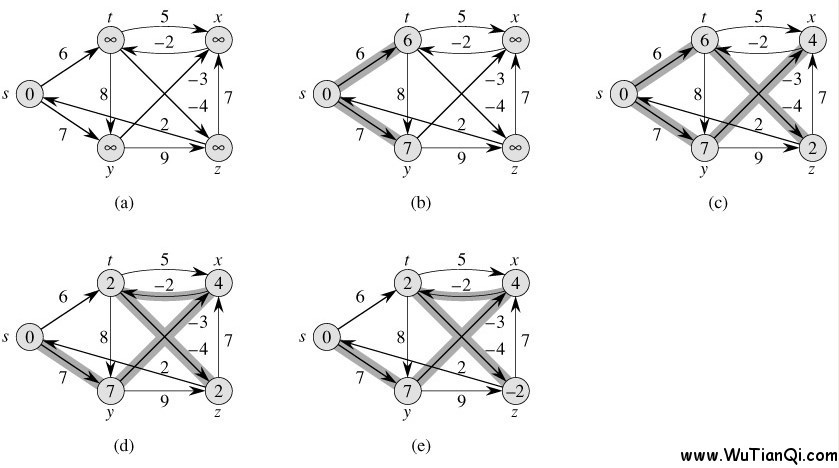
Bellman_Ford算法能用来解决负权图的单源最短路径问题,但是它的时间复杂度高于Dijkstra算法,本质是暴力求解。从起点出发,把图里所有边从头到尾松弛一遍,重复n次,就能算出起点到所有点的最短路径;因为任何最短路径最多只经过n‑1条边。跑完之后再扫一遍所有边,如果还能更新距离,就说明图里有负权回路,最短路径不存在。
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{
size_t n = _vertexs.size();
size_t srci = GetVertexIndex(src);
// vector<W> dist,记录srci-其他顶点最短路径权值数组
dist.resize(n, MAX_W);
// vector<int> pPath 记录srci-其他顶点最短路径父顶点数组
pPath.resize(n, -1);
// 先更新srci->srci为缺省值
dist[srci] = W();
// 总体最多更新n轮
for (size_t k = 0; k < n; ++k)
{
// i->j 更新松弛
bool update = false;
cout << "更新第:" << k << "轮" << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// srci -> i + i ->j
if (_matrix[i][j] != MAX_W && dist[i] != MAX_W && dist[i] + _matrix[i][j] < dist[j])
{
update = true;
//cout << _vertexs[i] << "->" << _vertexs[j] << ":" << _matrix[i][j] << endl;
dist[j] = dist[i] + _matrix[i][j];
pPath[j] = i;
}
}
}
// 如果这个轮次中没有更新出更短路径,那么后续轮次就不需要再走了
if (update == false)
{
break;
}
}
// 还能更新就是带负权回路
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// srci -> i + i ->j
if (_matrix[i][j] != MAX_W && dist[i] + _matrix[i][j] < dist[j])
{
return false;
}
}
}
return true;
}三、Floyd_Warshall算法
Floyd-Warshall算法是求任意两点之间最短路径的算法,依次把每个点当作中转点,判断从 i 到 j 是直接走更近,还是经过这个中转点 k 再走更近,不断更新所有点对的最短距离,三层循环跑完就得到全图最短路径。
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
size_t n = _vertexs.size();
vvDist.resize(n);
vvpPath.resize(n);
// 初始化权值和路径矩阵
for (size_t i = 0; i < n; ++i)
{
vvDist[i].resize(n, MAX_W);
vvpPath[i].resize(n, -1);
}
// 直接相连的边更新一下
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (_matrix[i][j] != MAX_W)
{
vvDist[i][j] = _matrix[i][j];
vvpPath[i][j] = i;
}
if (i == j)
{
vvDist[i][j] = W();
}
}
}
// 最短路径的更新i-> {其他顶点} ->j
for (size_t k = 0; k < n; ++k)
{
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// k 作为的中间点尝试去更新i->j的路径
if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W
&& vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
// 找跟j相连的上一个邻接顶点
// 如果k->j 直接相连,上一个点就k,vvpPath[k][j]存就是k
// 如果k->j 没有直接相连,k->...->x->j,vvpPath[k][j]存就是x
vvpPath[i][j] = vvpPath[k][j];
}
}
}
}
}以上就是C++图论核心之最短路径算法从原理到实战的详细内容,更多关于C++最短路径算法的资料请关注脚本之家其它相关文章!