
OpenCV-Python实现凸包的获取
作者:一天一篇Python库
前言
逼近多边形是某个图像轮廓的高度近似,而凸包的提出是为了简化逼近多边形的。其实,凸包跟逼近多边形很像,只不过它是物体最外层的“凸”多边形。
简单的概括,凸包是指完全包含原有轮廓,并且仅由轮廓上的点所构成的多边形。凸包的特点是每一处都是凸的,即在凸包内连接任意两点的直线都在凸包的内部,并且任意连续3个点的内角小于180度。
在OpenCV中,它给我们提供cv2.convexHull()来获取轮廓的凸包。其完整定义如下:
def convexHull(points, hull=None, clockwise=None, returnPoints=None):
points:轮廓
hull:返回值,为凸包角点。可以理解为多边形的点坐标,或索引。
clockwise:布尔类型,为True时,凸包角点将按顺时针方向排列;为False时,为逆时针。
returnPoints:布尔类型,默认值True,函数返回凸包角点的x/y坐标;为False时,函数返回轮廓中凸包角点的索引。
获取凸包角点
既然,我们已经了解了凸包的作用,并且理解了OpenCV提供的函数。下面,我们随便选取一张图,获取凸包角点。具体代码如下所示:
import cv2
img = cv2.imread("24.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
hull=cv2.convexHull(contours[0])
print(hull)
这里,我们随便获取了一张图像,并获取其凸包的角点。运行之后,角点坐标如下:
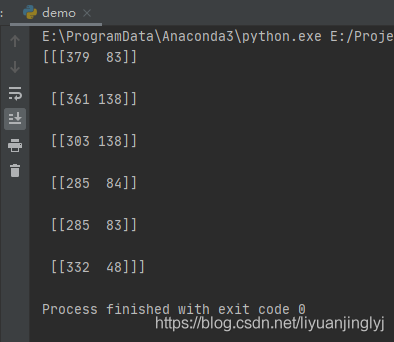
如果修改参数returnPoints为False,会返回对应的6个索引值。
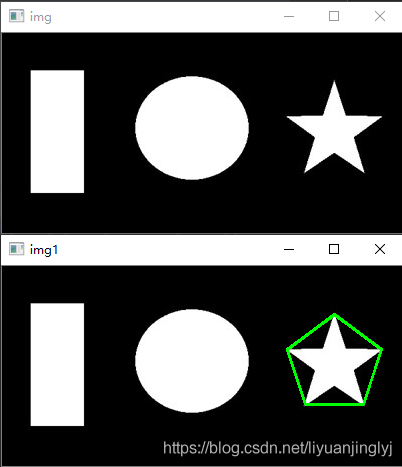
这里我们再添加一行代码就可以绘制凸包多边形了,具体添加的代码如下:
#获取hull之后
cv2.polylines(img, [hull], True, (0, 255, 0), 2)
cv2.imshow("img1", img)
运行之后,效果如下所示:
凸缺陷
凸包与轮廓之间的部分我们称之为凸缺陷。在OpenCV中使用函数cv2.convexityDefects()获取凸缺陷,其完整定义如下:
def convexityDefects(contour, convexhull, convexityDefects=None):
contour:轮廓
convexhull:凸包
convexityDefects:返回值,为凸缺陷点集。它是一个数组,返回的指包括[起点,终点,轮廓上的距离凸包最远点,最远点到凸包的近似距离]
特别注意,用该函数计算凸缺陷之前,我们需要使用函数cv2.convexHull()获取凸包,但其参数returnPoints必须为False。
下面,我们来使用该函数计算上图的凸缺陷。代码如下:
import cv2
img = cv2.imread("24.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
hull = cv2.convexHull(contours[0], returnPoints=False)
defects = cv2.convexityDefects(contours[0], hull)
print(defects)
for i in range(defects.shape[0]):
s, e, f, d = defects[i, 0]
start = tuple(contours[0][s][0])
end = tuple(contours[0][e][0])
far = tuple(contours[0][f][0])
cv2.line(img, start, end, [0, 255, 0], 2)
cv2.circle(img, far, 5, [0, 0, 255], -1)
cv2.imshow("img1", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:
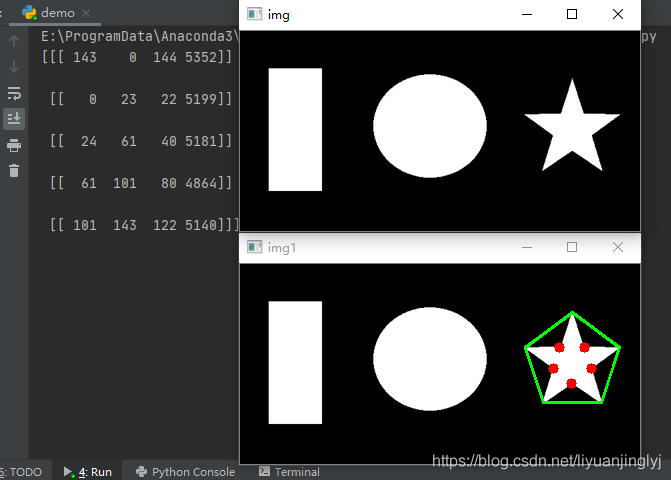
如上图所示,我们用点标记出来的凸缺陷,可以看到五角星的每个凹肩都是凸缺陷。
最后可以扩展以下,其中OpenCV提供函数cv2.isContourConvex()来判断轮廓是否是凸形的。同时,也提供了cv2.pointPolygonTest()函数来计算点到多边形(轮廓)的最短距离,也就是垂线距离,这个计算由称为点和多边形的关系测试。感兴趣的读者可以自己实验这两个方函数。
简单例子 手势图片
接下来,我们将介绍一张稍微难一点的图片——手势图片(finger.jpg),如下所示:

我们将会来寻找这个手势的凸包。基本的处理思路还是和之前的一致,只是要在二值化以及凸包点集集合的大小上做一些处理,取二值化的阈值为235,凸包点集中的点个数大于5,完整的Python代码如下:
import cv2
# 读取图片并转至灰度模式
imagepath = 'F://finger.jpg'
img = cv2.imread(imagepath, 1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化,取阈值为235
ret, thresh = cv2.threshold(gray, 235, 255, cv2.THRESH_BINARY)
# 寻找图像中的轮廓
image, contours, hierarchy = cv2.findContours(thresh, 2, 1)
# 寻找物体的凸包并绘制凸包的轮廓
for cnt in contours:
hull = cv2.convexHull(cnt)
length = len(hull)
# 如果凸包点集中的点个数大于5
if length > 5:
# 绘制图像凸包的轮廓
for i in range(length):
cv2.line(img, tuple(hull[i][0]), tuple(hull[(i+1)%length][0]), (0,0,255), 2)
cv2.imshow('finger', img)
cv2.waitKey()
检测到的凸包如下图所示:

可以发现,一共检测到2个凸包,一个是整个手势外围的凸包,正好包围整个手,另一个是两个手指形成的内部的图形,类似于O的凸包,这符合我们的预期。
到此这篇关于OpenCV-Python实现凸包的获取的文章就介绍到这了,更多相关OpenCV-Python 凸包内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!