
Python Opencv实现单目标检测的示例代码
作者:lemonQQP
这篇文章主要介绍了Python Opencv实现单目标检测的示例代码,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧
一 简介
目标检测即为在图像中找到自己感兴趣的部分,将其分割出来进行下一步操作,可避免背景的干扰。以下介绍几种基于opencv的单目标检测算法,算法总体思想先尽量将目标区域的像素值全置为1,背景区域全置为0,然后通过其它方法找到目标的外接矩形并分割,在此选择一张前景和背景相差较大的图片作为示例。

环境:python3.7 opencv4.4.0
二 背景前景分离
1 灰度+二值+形态学 轮廓特征和联通组件
根据图像前景和背景的差异进行二值化,例如有明显颜色差异的转换到HSV色彩空间进行分割。
1 原图

2 灰度化

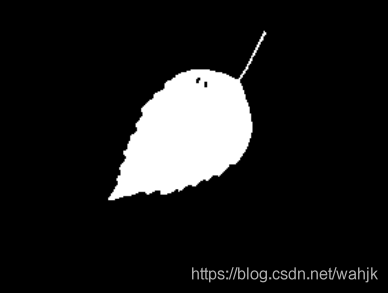
3 二值化

4 形态学处理
5 提取轮廓并找出目标外接矩形
代码封装:
def get_roi_contours(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#查找轮廓
contours, hierarchy = cv2.findContours(morph_image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
#选取轮廓面积最大的轮廓
area = 0
max_area_index = 0
for j in range(len(contours)):
if area < cv2.contourArea(contours[j]):
max_area_index = j
area = cv2.contourArea(contours[j])
rect = cv2.boundingRect(contours[max_area_index])
return rect
6 通过联通组件找到外接矩形
代码封装:
def get_roi_ConCom(image_path, morph_size, num_morph):
'''
参数详解:
image_path:所需处理图片路径
morph_size:形态学处理核的大小
num_morph:进行形态学处理的次数
'''
image = cv2.imread(image_path, cv2.IMREAD_COLOR)
#灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#二值化
threhold, binary_image = cv2.threshold(gray_image, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#形态学操作
kernel = cv2.getStructuringElement(shape=cv2.MORPH_RECT, ksize=morph_size)
morph_image = cv2.morphologyEx(binary_image, cv2.MORPH_CLOSE, kernel)
for i in range(num_morph-1):
morph_image = cv2.morphologyEx(morph_image, cv2.MORPH_CLOSE, kernel)
#联通组件查询
numlabels, components_img, stats, centers = cv2.connectedComponentsWithStats(morph_image, 8)
#获取除背景外的所有联通组件
stats_without_back = stats[1:]
#获取除背景外的所有联通组件的面积最大值
max_area = np.max(stats_without_back, axis=0)[-1]
#获取面积最大联通组件的index
max_area_index = stats_without_back[:, -1]==max_area
rect = stats_without_back[max_area_index]
return np.squeeze(rect)[0:4]
2 Kmeans聚类实现前景和背景的分离
1 kmeans聚类后的图像,由于簇的中心是随机初始化的,所以目标的像素值可能为0,也可能为1,若采用opencv的findContours则要求前景像素值为1。

2 利用轮廓特征找外接矩形
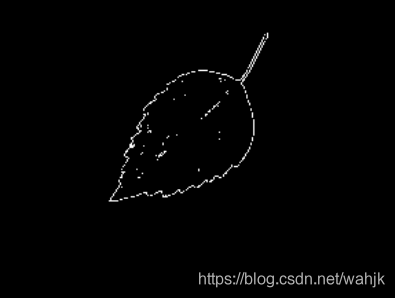
由于Kmeans随机初始化簇中心导致前景目标像素不确定,采用边缘提取的方法再查找轮廓。
边缘图:
代码封装:
def get_roi_Kmeans(image_path): image = cv2.imread(image_path, cv2.IMREAD_COLOR) image_data = image.reshape(-1, 3).astype(np.float32) #必须要转成浮点类型进行计算 #簇内平方和,标签和每个簇的中心 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 10, 1) interia, label, centers = cv2.kmeans(image_data, 2, None, criteria, 5, cv2.KMEANS_RANDOM_CENTERS) #二值化,将标签为0的转换为255,即是目标 label[label==0] = 255 label[label==1] = 0 #转换数据类型,轮廓查找要是uint8类型数据 thresh_img = label.reshape(image.shape[0:2]).astype(np.uint8) x_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 1, 0) y_grad = cv2.Sobel(thresh_img, cv2.CV_32F, 0, 1) x_grad = cv2.convertScaleAbs(x_grad) #ax + b 线性变换 y_grad = cv2.convertScaleAbs(y_grad) dst = cv2.add(x_grad, y_grad, dtype=cv2.CV_16S) #将两种sobel的加起来就可以得到整个边缘 dst = cv2.convertScaleAbs(dst) plt.imshow(dst, cmap='gray') #轮廓查找目标必须为1 contours, hierarchy = cv2.findContours(dst, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) #获取外接矩形 rect = cv2.boundingRect(contours[0]) return rect
三 总结
单目标检测较为简单,只要合理利用目标和背景的差异便可将其分离出来。当然单目标检测的方法还有很多,比如有目标模板的时候可以采用模板匹配或者均值漂移,有足够的数据集时也可采用机器学习和深度学习方法。
到此这篇关于Python Opencv实现单目标检测的示例代码的文章就介绍到这了,更多相关Opencv 单目标检测内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!